Já se perguntou como os motores dos drones, aeromodelos e até mesmo alguns carrinhos de controle remoto são acionados? O componente responsável por essa função é o ESC e vamos falar sobre suas características, aplicações, funcionamento e muito mais. Veja só:
Existem basicamente dois tipos de ESC: os ESCs brushed e os ESCs brushless, mas para explicá-los de maneira melhor, precisamos entender a diferença entre os motores que cada um controla:
 São os motores DC mais conhecidos por todos. Seu funcionamento é simples e consiste, como representado abaixo, em dois contatos chamados escovas, que podem ser de carvão ou grafite e são conectados direto à fonte de alimentação. São eles quem acionam as bobinas no tempo certo para que o campo eletromagnético ali gerado interaja com o campo magnético dos imãs fixos em sua carcaça, fazendo assim com que o motor gire.
São os motores DC mais conhecidos por todos. Seu funcionamento é simples e consiste, como representado abaixo, em dois contatos chamados escovas, que podem ser de carvão ou grafite e são conectados direto à fonte de alimentação. São eles quem acionam as bobinas no tempo certo para que o campo eletromagnético ali gerado interaja com o campo magnético dos imãs fixos em sua carcaça, fazendo assim com que o motor gire.

 A grosso modo, são motores com um funcionamento muito parecido com os famosos motores de indução trifásicos, principalmente por possuírem enrolamentos que resultam em 3 terminais de alimentação. Sua principal vantagem está na eficiência: esses motores tem um melhor aproveitamento energético, logo são capazes de converter mais energia elétrica em energia mecânica que os motores escovados. Para que seja possível acionar um motor brushless, é obrigatório o uso de um controlador eletrônico, pois é ele quem faz o correto chaveamento das bobinas e é sobre ele que vamos falar agora.
A grosso modo, são motores com um funcionamento muito parecido com os famosos motores de indução trifásicos, principalmente por possuírem enrolamentos que resultam em 3 terminais de alimentação. Sua principal vantagem está na eficiência: esses motores tem um melhor aproveitamento energético, logo são capazes de converter mais energia elétrica em energia mecânica que os motores escovados. Para que seja possível acionar um motor brushless, é obrigatório o uso de um controlador eletrônico, pois é ele quem faz o correto chaveamento das bobinas e é sobre ele que vamos falar agora.
 Chegamos ao foco principal desse post: apresentar o funcionamento e as aplicações desse modelo de ESC que será utilizado em projetos futuros.
O funcionamento de um ESC brushless é muito mais complexo que um brushed. Tudo é controlado por um microcontrolador que possui uma sequência binária pré-definida em seu firmware para o acionamento do circuito de MOSFETs que irão energizar as bobinas na devida sequência. O controle da velocidade é feito através de um sinal PWM recebido e interpretado pelo microcontrolador, que converte em uma frequência diferente de chaveamento, ou seja, quanto maior o valor recebido, mais rapidamente os MOSFETs serão acionados, aumentando a velocidade de rotação do motor.. Veja no modelo abaixo como acontece o acionamento das bobinas de acordo com a lógica binária que o ESC carrega:
Chegamos ao foco principal desse post: apresentar o funcionamento e as aplicações desse modelo de ESC que será utilizado em projetos futuros.
O funcionamento de um ESC brushless é muito mais complexo que um brushed. Tudo é controlado por um microcontrolador que possui uma sequência binária pré-definida em seu firmware para o acionamento do circuito de MOSFETs que irão energizar as bobinas na devida sequência. O controle da velocidade é feito através de um sinal PWM recebido e interpretado pelo microcontrolador, que converte em uma frequência diferente de chaveamento, ou seja, quanto maior o valor recebido, mais rapidamente os MOSFETs serão acionados, aumentando a velocidade de rotação do motor.. Veja no modelo abaixo como acontece o acionamento das bobinas de acordo com a lógica binária que o ESC carrega:
Créditos: elabz.com
 ESC com SBEC (Switching BEC): sua função e aplicações são idênticas à anterior, porém são ESCs com BEC acima de 3A e demandam um circuito mais robusto para o fornecimento de tal corrente, como MOSFETs e indutores.
OPTO ESC: São ESCs que não possuem o BEC em seu circuito. Apresentam tamanho reduzido e são muito utilizados em drones profissionais por não haver a necessidade de fornecimento dos 5V para o receptor, já que isso é feito por outros circuitos presentes na aeronave.
ESC com SBEC (Switching BEC): sua função e aplicações são idênticas à anterior, porém são ESCs com BEC acima de 3A e demandam um circuito mais robusto para o fornecimento de tal corrente, como MOSFETs e indutores.
OPTO ESC: São ESCs que não possuem o BEC em seu circuito. Apresentam tamanho reduzido e são muito utilizados em drones profissionais por não haver a necessidade de fornecimento dos 5V para o receptor, já que isso é feito por outros circuitos presentes na aeronave.
 OPTO ESC 4x1 acima e módulo único abaixo, ambos de 20A
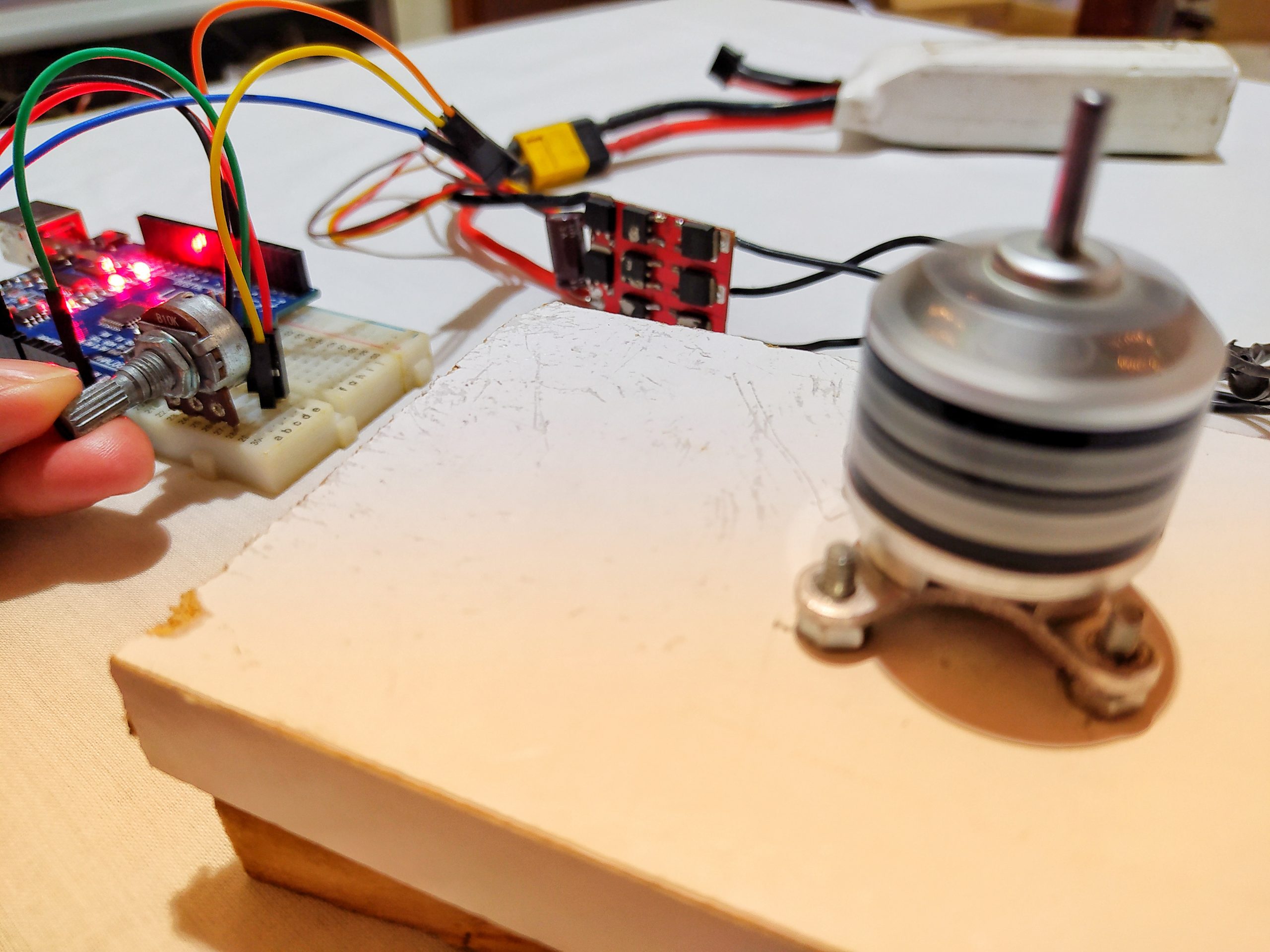
OPTO ESC 4x1 acima e módulo único abaixo, ambos de 20APara finalizar, vamos te ensinar a acionar um motor brushless de forma fácil e rápida usando um Arduino. Vamos precisar de: Materiais necessários para o projeto de exemplo
 A imagem abaixo trás o esquema de ligação. Utilizamos a saída de 5V fornecida pelo BEC para alimentar o arduino apenas para ilustrar seu funcionamento, não sendo necessário utilizar o fio vermelho caso prefira usar sua conexão USB.
A imagem abaixo trás o esquema de ligação. Utilizamos a saída de 5V fornecida pelo BEC para alimentar o arduino apenas para ilustrar seu funcionamento, não sendo necessário utilizar o fio vermelho caso prefira usar sua conexão USB.

//código exemplo para o acionamento de motor brushless
#include <Servo.h> //inclui a biblioteca Servo
Servo ESC; //cria o objeto ESC
int pot = A5; //informa ao arduino onde o potenciômetro está conectado
void setup(){
ESC.attach(6); //informa que o ESC está conectado ao pino digital 6
}
void loop(){
int valor = analogRead(pot); //faz a leitura do potenciômetro
valor = map(valor, 0, 1023, 0, 179); //associa o valor lido à velocidade do motor
ESC.write(valor); //envia os valores recebidos ao ESC
}
O funcionamento do código é bem simples: ao carregar a biblioteca Servo.h, criamos o objeto ESC e definimos através dele o pino de sinal do ESC. O potenciômetro conectado ao pino A5 informa um valor analógico que é convertido pela função map() em valores de ângulos para serem usados pela biblioteca. Como não estamos utilizando um servo motor, esses valores são enviados e interpretados pelo ESC como níveis de velocidade (enquanto que no servo são interpretados como valores de posição) e este, por sua vez aumenta ou diminui a velocidade do motor. Fácil demais, não é?
Agora basta carregar em seu Arduino, verificar as ligações e pronto, você acionou um motor brushless!!!

Hoje vimos um pouco sobre o funcionamento e as características desses motores e ESCs amplamente utilizados em drones e no meio modelista, seja no automodelismo, aeromodelismo ou helimodelismo. Esperamos que você tenha entendido como funcionam e consigam desenvolver aplicações com base no que foi apresentado aqui. Tem algum equipamento que utiliza essa configuração? Poste nas redes sociais e nos marque no Instagram: @eletrogate
|