Os estabilizadores são dispositivos versáteis presentes em diversos equipamentos eletrônicos, destinados a minimizar movimentos indesejados e proporcionar maior estabilidade durante o uso. Sua aplicação abrange desde smartphones até câmeras de ação e drones. A principal função dos estabilizadores digitais é contrabalançar vibrações e tremores que podem ocorrer durante atividades em movimento, garantindo resultados mais suaves e consistentes. Esses dispositivos empregam tecnologia digital para detectar e corrigir automaticamente os deslocamentos.
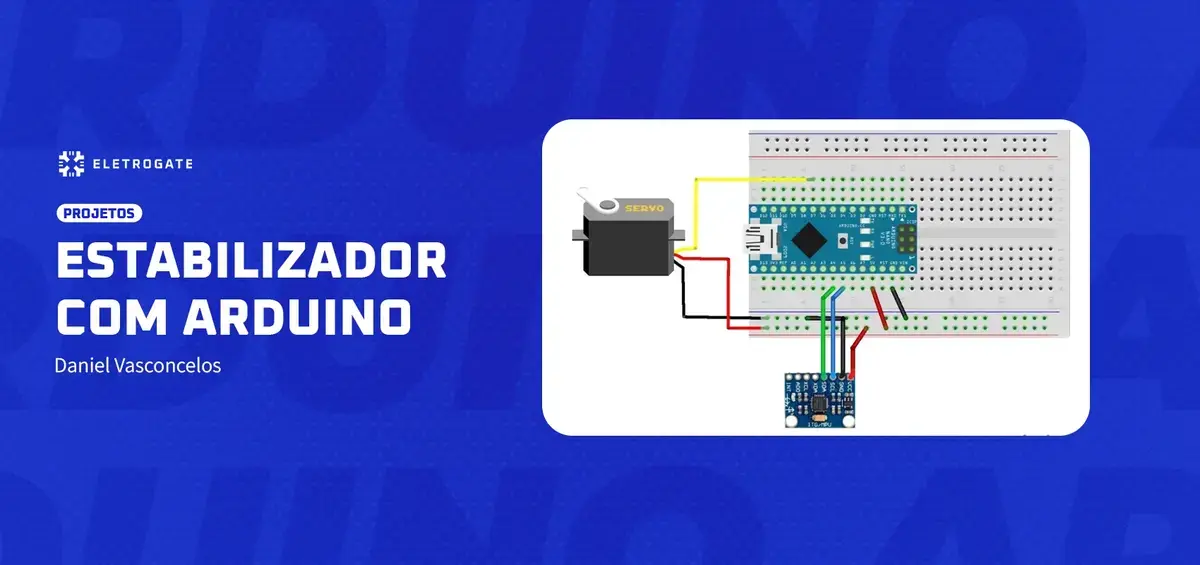
O funcionamento de um estabilizador, seja ele para câmeras, smartphones ou outros dispositivos eletrônicos, baseia-se no emprego de sensores e sistemas de controle para contrabalançar movimentos indesejados, como detalha a seguir: Sensores Giroscópios e Acelerômetros: O estabilizador possui sensores giroscópios e acelerômetros embutidos. Os giroscópios medem a taxa de rotação e os acelerômetros detectam acelerações lineares. Juntos, esses sensores fornecem informações precisas sobre os movimentos e a orientação do dispositivo. Cálculo de Movimento: O processador do estabilizador utiliza as informações dos sensores para calcular os movimentos indesejados que estão ocorrendo. Isso inclui inclinações, rotações e deslocamentos em todas as direções. Motores e Atuadores: Com base nos cálculos, o sistema determina as correções necessárias para manter o dispositivo nivelado e estável. O estabilizador possui motores e atuadores responsáveis por realizar essas correções. Feedback em Tempo Real: O sistema opera em tempo real, recebendo continuamente informações dos sensores, calculando correções necessárias e ajustando os motores e contrapesos para manter a estabilidade. O resultado desse processo é uma plataforma estável que contrabalança efetivamente os movimentos do operador, proporcionando vídeos e imagens suaves e profissionais, mesmo em condições dinâmicas. Esse tipo de estabilização é amplamente utilizado em diversas situações em que a estabilidade é crucial. A seguir, desenvolveremos um estabilizador baseado no princípio de contrabalanceamento no eixo do sensor MPU-6050. Para uma determinada angulação, o servo gira esse mesmo valor no sentido oposto ao do sensor, a fim de manter em 0, pois x°- x°= 0. Devemos levar em consideração de que este estabilizador não possui precisão angular, principalmente pelo uso de peças de baixa precisão, como o servo Sg-90 e o giroscópio MPU-6050.

#include <MPU6050_tockn.h> // Inclui a biblioteca para o MPU6050
#include <Wire.h> // Inclui a biblioteca para a comunicação I2C
#include <Servo.h> // Inclui a biblioteca para controle do servo motor
MPU6050 mpu6050(Wire); // Cria uma instância do objeto MPU6050
Servo servo; // Cria uma instância do objeto Servo
void setup() {
Serial.begin(9600); // Inicializa a comunicação serial com taxa de 9600 bps
Wire.begin(); // Inicializa a comunicação I2C
mpu6050.begin(); // Inicializa o sensor MPU6050
mpu6050.calcGyroOffsets(true); // Calcula e compensa automaticamente os offsets do giroscópio
mpu6050.update(); // Atualiza os valores do sensor
servo.attach(7); // Anexa o servo motor ao pino digital 7
}
void loop() {
mpu6050.update(); // Atualiza os valores do sensor MPU6050
Serial.println(mpu6050.getAngleX()); // Imprime o ângulo em torno do eixo X no console serial
servo.write(map(mpu6050.getAngleX(), 0, 175, 175, 0)); // Mapeia o ângulo lido para o intervalo do servo e define a posição do servo motor
}
|